韩国启动研发全球首个双向脑机接口外骨骼系统
 韩国科学技术院与天使机器人公司正式启动了一项医疗器械开发基金旗舰项目。该项目定名为针对四肢瘫痪患者开发的双向脑机接口可穿戴机器人控制系统,总体研发周期跨度为2026年4月至2032年12月。
韩国科学技术院与天使机器人公司正式启动了一项医疗器械开发基金旗舰项目。该项目定名为针对四肢瘫痪患者开发的双向脑机接口可穿戴机器人控制系统,总体研发周期跨度为2026年4月至2032年12月。
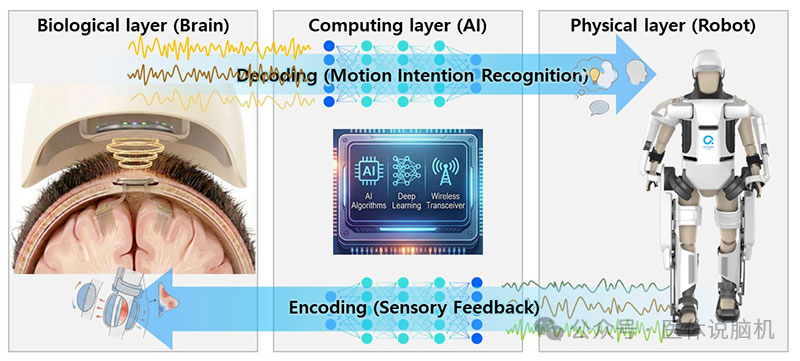 图 1. 用于恢复四肢瘫痪患者功能的集成式双向脑-机器人架构
图 1. 用于恢复四肢瘫痪患者功能的集成式双向脑-机器人架构这掩盖了一个极大的盲区,也就是系统完全缺乏物理空间中的真实力学反馈闭环。韩国团队此次制定的研发目标,是直接读取大脑信号来驱动外骨骼机器人的物理位移,随后将机器人行走时足底感受到的地面反作用力、各处关节的扭矩状态以及机器皮肤的触觉,同步逆向传输回患者的大脑感觉皮层。这种底层架构能够让患者重新获得躯体的真实物理触感,彻底终结了以往单向脑控设备带来的严重认知负荷与感觉剥夺僵局。
在技术路线的选择上,该系统毫无妥协地走向了侵入式方案。要实现微秒级的高保真双向信息交互,非侵入式头戴设备受制于人类颅骨极强的物理屏蔽效应,不仅读取的神经信号分辨率极低,更无法将外部复杂的物理反馈精准逆向写入毫米级的大脑感觉皮层。
该项目必须依赖神经外科手术,将高分辨率微型多模态神经电极直接贴附在硬脑膜下或直刺入大脑皮层深处。只有让微电极直接与脑组织内的神经元产生物理接触,系统才具备在极低延迟状态下,同时处理数百个信号通道的双向编解码能力。这条硬核路径也意味着他们必须跨越人体长期生物相容性这一终极屏障。
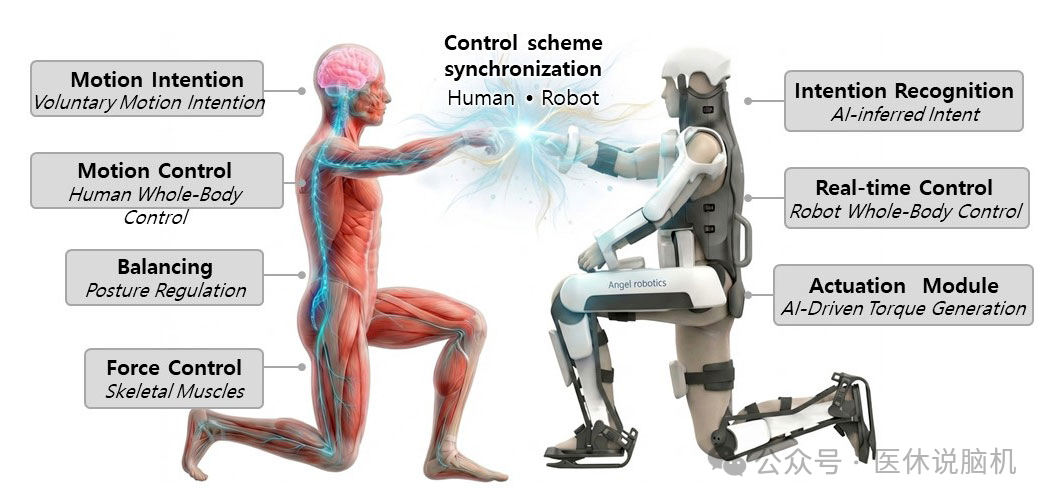 图 2. 受人类运动机制启发的分层机器人控制架构
图 2. 受人类运动机制启发的分层机器人控制架构支撑这条技术路线实现的是其极高集成度的跨学科团队背景。在研发分工上,项目组建了极为典型的集团军阵容。天使机器人创始人孔庆哲教授团队曾在国际半机器人肢体大赛中屡获金牌,他们在此次计划中主导可穿戴机器人的控制逻辑与运动意图的人工智能解析,核心诉求是确保机器人传感器收集的数据能够高保真回传。
金正教授团队负责开发能替代人类真实皮肤知觉的机器人电子皮肤及相关传感信息处理技术。内部多位顶尖专家同步推进底层技术:朴亨顺团队推进康复机器人的意图识别,赵成浩教授钻研深度学习信号解析,李志勋教授攻坚超低功耗生物神经接口电路,李贤珠教授主攻高分辨率微型多模态神经电极的制造,闵奎宰教授负责神经接口人工智能半导体系统,郑在雄教授则深耕精准的脑信号测量与刺激技术。这种涵盖了微纳制造、半导体芯片、机械动力学与神经医学的系统级阵型,直接拉高了整个脑机结合外骨骼赛道的工程壁垒。
 技术转化方面,已经在韩国科斯达克上市的天使机器人公司将作为该项目的商业化主导方,全权负责从系统集成、临床验证到最终获取韩国食品药品安全处组合医疗器械批准的全生命周期管理。技术的最终愿景是让四肢重度瘫痪患者摆脱轮椅,在日常环境中实现独立行走,重新建立对物理世界的精细感知。
技术转化方面,已经在韩国科斯达克上市的天使机器人公司将作为该项目的商业化主导方,全权负责从系统集成、临床验证到最终获取韩国食品药品安全处组合医疗器械批准的全生命周期管理。技术的最终愿景是让四肢重度瘫痪患者摆脱轮椅,在日常环境中实现独立行走,重新建立对物理世界的精细感知。
综合来看,这项长达六年的旗舰计划给我们释放了极强的产业信号:下一代康复医疗设备的高地,必然属于那些率先实现神经信号与复杂机械动力学高度同步的系统。只有真正打通大脑与物理世界的双向数据流,企业才能在未来的万亿级市场中掌握行业标准的制定权。
本文2026-06-27 10:39:26发表“行业新闻”栏目。
本文链接:https://www.yixiuqixie.com/article/1110.html
相关文章




- 脑机新声-中国脑机接口产业14城城市布局深度研究报告202605.pdf
- 全球非侵入式脑机接口(BCI)行业深度调研与代表性企业进展报告.pdf
- 脑机新声内参:全球脑机接口电极与核心材料技术全景解析.pdf
- 脑机新声内参(下册):中国脑机接口产业扶持与宏观政策汇编.pdf
- 脑机新声汇编《中国脑机接口医疗准入与医保定价全景汇编(上册)》.pdf
- 脑机接口入行指导手册-脑机新声0505(1).pdf
- 河北省脑机接口产业发展规划建议-脑机新声.pdf
- 传统药企进入脑机接口赛道行业研究及可行性分析报告.pdf
- 【压缩版】神经介入企业进入脑机接口赛道的机会和挑战.pdf
- 【脑机新声】全球脑机接口技术前沿:2026年十大最具代表性BCI公司临床进展与行业深度洞察报告.pdf